试题 试卷
题型:填空题 题类:真题 难易度:困难
内蒙古鄂尔多斯2021年中考数学试卷
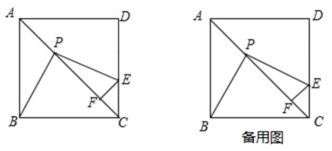
(1)当点P在上运动时,{#blank#}1{#/blank#}(用含t的式子表示);
(2)当与的和等于长方形周长的时,{#blank#}2{#/blank#}.
试题篮
 中,
中, ,
,  . 动点P从点A出发,沿线段
. 动点P从点A出发,沿线段 ,
,  向点C运动,速度为
向点C运动,速度为 ;动点Q从点B出发,沿线段向点C运动,速度为
;动点Q从点B出发,沿线段向点C运动,速度为 . 点P,Q同时出发,任意一点到达点C时两点同时停止运动.设运动时间为
. 点P,Q同时出发,任意一点到达点C时两点同时停止运动.设运动时间为 .
.  上运动时,
上运动时, {#blank#}1{#/blank#}(用含t的式子表示);
{#blank#}1{#/blank#}(用含t的式子表示); 与
与 的和等于长方形周长的
的和等于长方形周长的 时,
时, {#blank#}2{#/blank#}.
{#blank#}2{#/blank#}.