试题
试题
试卷
登录
注册
当前位置:
首页
题型:单选题
题类:
难易度:困难
2024普通高中学业水平考试(通用技术)模拟卷一
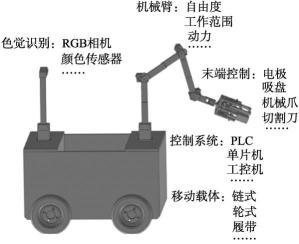
如图所示的温室大棚中种植的西红柿,小明团队决定设计一个果树收摘机器人,帮助果农解决果树采摘难题。小明团队进行了调查、统计、分析,提出了初步设计方案:果树收摘机器人由视觉识别系统、移动载体、机械臂、控制系统及末端执行装置5部分组成;机械臂为3自由度;视觉传感器采用RGB相机,安装于后方;末端控制器由舵机和电机控制,当末端控制器夹住果实后,由安装在一侧的切割刀具切割果柄;控制系统采用PLC。请回答小题。
(1)、
下列关于该系统设计的分析不正确的是( )
A、
设计该系统时,要从整体出发,以系统整体功能的最优为目的
B、
各子系统单独工作,都不能实现果树收摘功能,体现了系统的整体性
C、
PLC损坏只会影响控制子系统,不会影响末端控制子系统
D、
末端控制本身也可以是个系统
(2)、
从控制系统的角度分析,下列有关该果树收摘机器人的说法不恰当的是( )
A、
可以设计成开环控制系统
B、
视觉识别系统可以作为控制系统的输入端
C、
机械臂可以作为执行器的组成部分
D、
天气变化是设计该控制系统的干扰因素
举一反三
一堆沙子、钢筋、水泥等等材料散放在一起没有什么意义,但是如果将它们按照一定的结构形式造成一座桥梁,就具有交通的功能,这个案例说明系统最基本的特性是( )
单纯的混凝土梁抗拉性能差,单纯的钢筋不能做梁,而钢筋混凝土梁具有优良的抗压和抗拉性能。试用系统的特性对这一事实做简要分析。
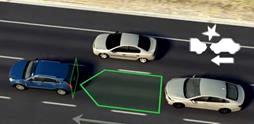
自适应巡航控制(ACC)是通过调整车速以适应交通状况的汽车运行控制。其控制过程为:在车辆行驶过程中,安装在车辆前部的雷达持续扫描车辆前方,通过接收雷达信号检测出与前车的车距,同时轮速传感器采集车速信号,当与前车之间的距离过小或过大时,ACC控制单元通过协调制动防抱死系统和发动机控制系统控制车轮转速,使车辆与前方车辆始终保持在设定的安全距离。请根据示意图和描述,完成以下任务:
如图所示是一款电动平衡车。该系统主要由控制器、陀螺仪、电机、蓄电池、车体等部分组成。关于该系统,下列说法不正确的是( )
如图所示为一款家用空气净化器。其内置的传感器可实时检测室内空气质量并反馈给处理芯片,芯片根据检测结果启动信号灯驱动电路,针对空气质量从优秀到严重污染的6个级别相应亮起1至6盏灯。根据示意图和以上描述,完成以下任务:
如图所示为某汽车的电动机械式助力转向控制系统原理图。当系统工作时,控制单元根据方向盘转向扭矩、转动方向和车速等数据进行计算,然后向伺服电机发出指令,使伺服电机输出方向和大小合适的扭矩,助力车轮的转向,提高了驾驶的舒适性。本系统提供的助动力大小与车速成反比,提高了汽车高速行驶时的安全性;方向盘不转向时系统不产生助动力,降低了能耗。从控制的角度分析,下列说法中正确的是( )
返回首页
相关试卷
2025年1月浙江通用技术高考选考真题
浙江省余姚名校2023-2024学年高二下学期通用技术3月质量检测(选考)试卷
浙江省强基联盟2024年3月高三通用技术普通高校招生选考科目考试
浙江省宁波余姚市重点中学2023-2024学年高二下学期通用技术3月质量检测(学考)试卷
浙江省宁波余姚市重点中学2023-2024学年高一下学期通用技术3月质量检测试卷
试题篮
编辑
生成试卷
取消
登录
x
请输入网站账号/手机号码/邮箱
请输入密码
自动登录
忘记密码
登录
其它登录方式:
免费注册