试题
试题
试卷
登录
注册
当前位置:
首页
题型:综合题
题类:模拟题
难易度:困难
浙江省2018届高三上学期通用技术选考试题
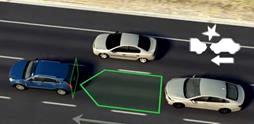
自适应巡航控制(ACC)是通过调整车速以适应交通状况的汽车运行控制。其控制过程为:在车辆行驶过程中,安装在车辆前部的雷达持续扫描车辆前方,通过接收雷达信号检测出与前车的车距,同时轮速传感器采集车速信号,当与前车之间的距离过小或过大时,ACC控制单元通过协调制动防抱死系统和发动机控制系统控制车轮转速,使车辆与前方车辆始终保持在设定的安全距离。请根据示意图和描述,完成以下任务:
(1)、
自适应巡航的控制方式属于
(在①开环控制;②闭环控制中选择合适的选项,将序号填写在横线处)
(2)、
该系统的执行器和被控对象分别是
和
(在①制动防抱死系统和发动机控制系统;②车轮;③车辆;④前方车辆中选择合适的选项,将序号填写在横线处)
(3)、
通过协调制动防抱死系统和发动机控制系统控制车轮转速,使车辆与前方车辆始终保持在设定的安全距离。此“设定的安全距离”属于控制系统的
(在①控制的目标;②控制的条件;③被控量;④控制量中选择合适的选项,将序号填写在横线处)
(4)、
为提高该系统的工作效果,以下不属于有效的优化措施是
、
(在①提高车距检测灵敏度与精确度;②增加安全距离;③提高刹车与油门控制的精准度;④增加雷达测速报警装置中选择合适的选项,将序号填写在横线处)。
举一反三
如图所示,电吹风是我们生活中最常见的小家电之一。它的工作原理如下:人们通过①(开关)控制②(电动机)的启动、关闭和转速;电动机驱动转子带动③(风叶)旋转;当风叶旋转时,空气从进风口吸入,并使形成的离心气流再由风筒前嘴吹出。空气通过时,若选择开关热风挡,使装在风嘴中的④(电热元件)通电变热,则吹出的是热风;若选择开关冷风挡,不使电热元件通电发热,则吹出的是冷风。电吹风就是以此来实现烘干和整形的目的。
比较闭环控制系统和开环控制系统,下面判断错误的是( )
以下系统不属于系统优化的是( )
集成环保灶是集燃气灶、吸油烟机、消毒柜等功能于一体的厨房革新产品,具有环保、节能、无油烟、节省空间等特点。其吸烟口在灶腔上方,和锅沿的距离只有2、3公分,油烟一形成就被吸烟机吸走并迅速排出,除烟率达95%以上,使厨房更干净;消毒柜位于燃气灶下方,采用臭氧发生器消毒加紫外线消毒,消毒完毕进入烘干状态,使厨具更卫生,而且节省了独立消毒柜的存放空间;在灶具通电情况下,气敏传感器全程监控漏气情况,若燃气泄漏,在浓度未达到闪爆点前系统将自动报警并启动风机吸排,吸净后自动关闭风机,灶腔里还设计了溢流孔,若发生烧水溢流浇灭火焰时,传感器将信号传给控制器,熄火保护装置将自动切断气源,从而使燃气灶的使用更安全。(将序号填写在“
”处)
如图所示是一款智能垃圾桶。投垃圾时,手或垃圾靠近感应区上方,桶盖会自动打开,投入后桶盖会自动关闭,该控制系统的控制手段和控制方式属于( )
如图所示是抽水马桶系统示意图。以下关于该系统的说法中不正确的是( )
返回首页
相关试卷
2025年1月浙江通用技术高考选考真题
浙江省余姚名校2023-2024学年高二下学期通用技术3月质量检测(选考)试卷
浙江省强基联盟2024年3月高三通用技术普通高校招生选考科目考试
浙江省宁波余姚市重点中学2023-2024学年高二下学期通用技术3月质量检测(学考)试卷
浙江省宁波余姚市重点中学2023-2024学年高一下学期通用技术3月质量检测试卷
试题篮
编辑
生成试卷
取消
登录
x
请输入网站账号/手机号码/邮箱
请输入密码
自动登录
忘记密码
登录
其它登录方式:
免费注册