试题
试题
试卷
登录
注册
当前位置:
首页
题型:综合题
题类:模拟题
难易度:困难
浙江省通用技术高考复习综合测试试卷(八)
回答下列问题
图1 实物图
(1)、
如图实物图所示,工程师恩格尔伯格(Joseph Engelberger)与机械运动学、人体解剖学和计算机等领域的专家组建团队,共同研发了世界上第一台工业机器人,体现技术的创新性,也体现技术
性质。该团队在研发该产品时采用了
(①综合性;②两面性;③专利性;④功能模拟法;⑤黑箱方法,从上述选项中选一项,将序号填入横线中)。
(2)、
如图系统示意图所示,为将一个物体从A移到B位置,需要一个庞大系统来实现,从系统分析综合性原则考虑,首先要解决
(①回转伺服控制器;②视觉系统;③控制计算机;④通讯协议;⑤滑觉与力觉传感器,从上述选项中选一项,将序号填入横线中)。
图2 系统示意图
(3)、
如图1实物图所示,Ⅰ、Ⅱ、Ⅲ、Ⅳ、Ⅴ、Ⅵ是为完成转动的伺服电动机。其中一个机械臂控制系统如图所示,该闭环控制系统的被控对象是
,执行器是
,从控制计算机接收到的指令的含义是
(①机械臂;②伺服电动机;③伺服电动机的速度;④伺服电动机的转动位置;⑤机械臂的位置;⑥伺服电动机的转动的速度,从上述选项中分别选一项,将序号填入横线中)。
举一反三
系统是一个整体,系统的整体功能是各个要素在孤立状态下所没有的。
“嫦娥一号”的发射是由卫星系统、运载火箭系统、发射场系统、测控系统、地面应用系统等五大系统协同工作完成的。这个过程主要体现了系统的( )
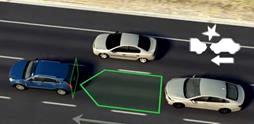
自适应巡航控制(ACC)是通过调整车速以适应交通状况的汽车运行控制。其控制过程为:在车辆行驶过程中,安装在车辆前部的雷达持续扫描车辆前方,通过接收雷达信号检测出与前车的车距,同时轮速传感器采集车速信号,当与前车之间的距离过小或过大时,ACC控制单元通过协调制动防抱死系统和发动机控制系统控制车轮转速,使车辆与前方车辆始终保持在设定的安全距离。请根据示意图和描述,完成以下任务:
如图所示为纸浆浓度控制系统工作原理示意图,其工作原理是:控制器将传感器检测到的配浆浓度与设定值相比较,根据偏差值控制电动调节阀调节清水流量,从而使配浆浓度达到设定值。请回答(1)~(3)题。
下列方法中不正确黑箱方法的是( )
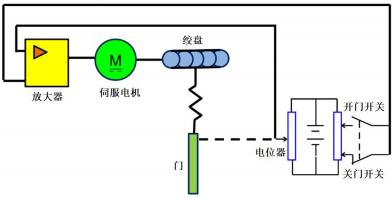
如图所示为仓库大门位置控制系统示意图,合上开门开关,产生的偏差电压信号被 放大器放大后,驱动伺服电机转动,绞盘牵动大门向上升起,当大门升到规定高度时,电位器的滑动引脚移动,放大器输出信号随之变化,电动机停止转动;反之,合上关门开关,伺服电机反向转动,绞盘转动使大门下降至规定位置。请完成问题。
返回首页
相关试卷
2025年1月浙江通用技术高考选考真题
浙江省余姚名校2023-2024学年高二下学期通用技术3月质量检测(选考)试卷
浙江省强基联盟2024年3月高三通用技术普通高校招生选考科目考试
浙江省宁波余姚市重点中学2023-2024学年高二下学期通用技术3月质量检测(学考)试卷
浙江省宁波余姚市重点中学2023-2024学年高一下学期通用技术3月质量检测试卷
试题篮
编辑
生成试卷
取消
登录
x
请输入网站账号/手机号码/邮箱
请输入密码
自动登录
忘记密码
登录
其它登录方式:
免费注册