试题
试题
试卷
登录
注册
当前位置:
首页
题型:单选题
题类:常考题
难易度:普通
通用技术选考高三千题练第十一章控制与设计(三)
如图所示是一款四足机器人它的自平衡系统工作原理是:当机器人受到外力作用时,由惯性测量单元IMU模块测量出机器人当前的状态,经内置CPU进行分析计算,驱动电动机运转,电动机带动四足机器人的关节运动,使机器人的状态作相应调整,从而维持机器人的平衡状态。关于该机器人平衡控制系统,以下说法中不恰当的是( )
A、
该系统为闭环控制系统
B、
控制量为电机的转动量
C、
被控对象为四足机器人
D、
IMU模块只检测输入量
举一反三
学校开水房一般都采用全自动电开水器。该温度控制为( )控制系统
如图所示为某款混合动力汽车,具有动力好、排放低、起步平顺等优点。在怠速和低速行驶时,发动机停止运转,只靠电动机驱动,当传感器监测到车速达到发动机最佳工况时,行车电脑发送切换指令择动离合器贴合到油动侧;当刹车降速后,又自动切回电机驱动并停止给发动机供油。请根据示意图和描述,完成以下任务:
如图所示是智能清洁机器人,具有吸尘、防撞功能。吸尘系统用电机带动清扫刷转动,清扫灰尘并将灰尘集中于吸风口处,由吸尘机构产生的吸力将灰尘吸入灰尘存储器中。防撞系统中传感器检测与周围障碍物的距离,单片机对信号加以判断,控制电机驱动轮子改变行驶方向以躲避障碍。如果吸尘系统与防撞系统的被控对象分别为清扫刷和轮子,则以下分析不合理的是( )
如图所示是四旋翼无人机,具有可垂直起降、可空中悬停等特点。四旋翼无人机一般是由飞控系统、导航系统、动力系统、数据链传输系统等组成。当该无人机处于自动悬停工作模式时,依靠无人机内部的检测单元,系统可以识别当前的姿态,控制模块给执行模块发送各种指令,实现无人机实现高度和水平位置的锁定,下列关于自动悬停控制系统的分析中正确的是( )
如图所示的食堂智能结算台,消费者把菜品放在摄像头下,结算台的CPU将扫描的菜品与数据库中的图形对比识别,统计整单金额,并在显示器上显示。消费者核对后,自助刷卡支付。下列关于该智能结算台控制系统的说法中,正确的是( )
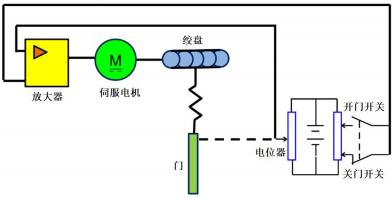
如图所示为仓库大门位置控制系统示意图,合上开门开关,产生的偏差电压信号被 放大器放大后,驱动伺服电机转动,绞盘牵动大门向上升起,当大门升到规定高度时,电位器的滑动引脚移动,放大器输出信号随之变化,电动机停止转动;反之,合上关门开关,伺服电机反向转动,绞盘转动使大门下降至规定位置。请完成问题。
返回首页
相关试卷
2025年1月浙江通用技术高考选考真题
浙江省余姚名校2023-2024学年高二下学期通用技术3月质量检测(选考)试卷
浙江省强基联盟2024年3月高三通用技术普通高校招生选考科目考试
浙江省宁波余姚市重点中学2023-2024学年高二下学期通用技术3月质量检测(学考)试卷
浙江省宁波余姚市重点中学2023-2024学年高一下学期通用技术3月质量检测试卷
试题篮
编辑
生成试卷
取消
登录
x
请输入网站账号/手机号码/邮箱
请输入密码
自动登录
忘记密码
登录
其它登录方式:
免费注册