试题 试卷
题型:单选题 题类:常考题 难易度:困难
浙江省温州市普通高中通用技术2019年11月选考适应性出测卷
A.超声波传感器与支架的连接牢固可靠,车子变速时不易掉落
B.支架与车身之间采用直径为2mm的螺栓螺母连接,车身的宽度为70mm,并预留安装孔;
C.支架不能遮挡住超声波传感器前方的发送器与接收器;
D.超声波传感器与车身之间的距离为20mm。
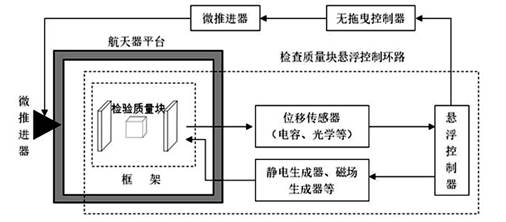
从控制系统的角度分析,下列说法不正确的是( )
试题篮