试题
试题
试卷
登录
注册
当前位置:
首页
题型:单选题
题类:常考题
难易度:普通
系统特性及优化
如图所示为最新研制的仿生机械蝴蝶。它仅重32克,其翅膀展开长5cm,身上仅带有一个传感器和舞动翅膀的机械构造,为了减轻重量,它的飞行要靠固定场地上摄像头的帮助,因此其只能在固定场地内飞行。以下关于该系统的说法中不正确的是( )
A、
机械蝴蝶持续飞舞时间会慢慢变短,体现了系统的动态性
B、
当场地上摄像头岀故障时,机械蝴蝶的飞舞会失控,体现了系统的整体性
C、
当受到其他昆虫等影响时,系统会自动修正飞舞路线,体现了系统良好的环境适应性
D、
它只能在固定场地内飞行,体现了系统的局限性
举一反三
如图所示是违法鸣笛抓拍系统。主要由控制主机、软件、声学探头、高清摄像头、LED 补光灯等组成。下列说法中错误的是( )
如图为某化工厂废气处理系统工艺流程。将废气送入洗涤塔,去除大颗粒粉尘,经洗涤后的废气通过高压风机进入脱附塔,通过脱附塔中活性炭和低压蒸汽等物质的综合作用实现废气的无害化转化,最后经检测仪检测后,将符合排放要求的气体由烟囱排放,不符合的废气经冷凝器及多级分离桶分离后重新处理。
如图所示为太阳能热水器水位控制系统的结构示意图。当水箱水位低于最低水位时,由控制器打开电磁阀,水箱进水;当水位上升到最高水位时,控制器关闭电磁阀,停止进水。
无人驾驶汽车是智能汽车的一种,需要计算机系统与汽车系统的有机整合。其主要工作原理是:计算机系统根据用户选定的目的地自动规划行车路线,导航系统会实时检测行车路线是否偏移,通过计算机控制转向系统修正路线;行驶中利用车载传感器来感知车辆周围环境,计算机根据车载传感器所获得的道路、车辆位置和障碍物等信息,及时控制转向系统和制动系统,实现避让和超车,从而使车辆能够安全、可靠地在道路上行驶。据此回答下题。
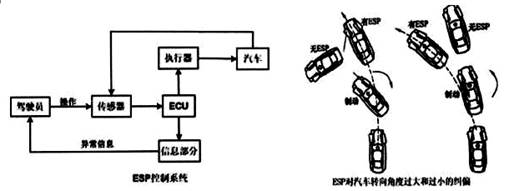
汽车电子稳定控制系统((ESP)用于实时监控汽车的行驶状态,当车辆转向角度过大或过小时,使其避免偏离理想轨迹,帮助驾驶员轻松操作。其控制原理是通过ECU计算出保持车身稳定的理论值,与偏航率传感器测得的数据进行比较,发出平衡纠偏指令牵制发动机动力输出,对各个车轮进行有目的的制动,自动纠正车辆轨迹。根据上述描述完成问题。
如图所示为某传统的电饭煲,其工作过程分煮饭和保温两种。煮饭时,按下煮饭开关,靠感温磁体的吸力带动杠杆开关使大功率加热电板加热。当内锅里的水被蒸发掉,锅底的温度达到103℃时,感温磁体的吸力瞬间变小,切断煮饭电源,然后进入保温阶段。保温过程中,当温度低于约70℃时双金属片逐渐冷却向一侧弯曲,接通小功率发热管电源进行加热;当温度达到约80℃以上时,双金属片向另一侧弯曲,切断小功率发热管的电源,停止加热。如此反复,即达到保温效果。请回答下面小题。
返回首页
相关试卷
2025年1月浙江通用技术高考选考真题
浙江省余姚名校2023-2024学年高二下学期通用技术3月质量检测(选考)试卷
浙江省强基联盟2024年3月高三通用技术普通高校招生选考科目考试
浙江省宁波余姚市重点中学2023-2024学年高二下学期通用技术3月质量检测(学考)试卷
浙江省宁波余姚市重点中学2023-2024学年高一下学期通用技术3月质量检测试卷
试题篮
编辑
生成试卷
取消
登录
x
请输入网站账号/手机号码/邮箱
请输入密码
自动登录
忘记密码
登录
其它登录方式:
免费注册