题型:实验探究题 题类:真题 难易度:困难
阅读短文,回答问题:
扫地机器人
扫地机器人是一款能自动清扫的智能家用电器,如图甲.

机器人通过电动机旋转产生高速气流,将灰尘、杂物吸入集尘盒;其防滑轮皮采用凸凹材质制成;底部安装有塑料刷,用于清扫吸附在地板上的灰尘及轻小物体;前端装有感应器,通过发射、接收超声波或红外线来侦测障碍物.当剩余电量减为电池容量的20%时,机器人会主动寻找充电器充电.表一为某扫地机器人的部分参数.电池容量指放电电流与放电总时间的乘积.
表一:
额定工作电压 | 12V | 额定功率 | 30W |
电池容量 | 2500mAh | 工作噪音 | <50dB |
机器人中吸尘电机的吸入功率是衡量其优劣的重要参数,测得某吸尘电机的吸入功率与真空度、风量间的对应关系如表二.真空度指主机内部气压与外界的气压差.风量指单位时间内通过吸尘电机排出的空气体积.吸尘电机吸入功率与输入功率的比值叫做效率.
表二:
真空度(Pa) | 400 | 450 | 500 | 550 | 600 |
风量(m3/s) | 0.025 | 0.02 | 0.017 | 0.015 | 0.013 |
吸入功率(W) | 10.00 | 9.00 | 8.50 | 7.80 |
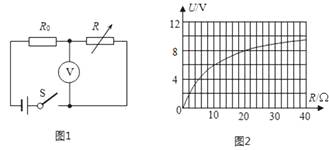
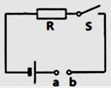
光敏电阻是制作灰尘传感器的常用元件.图乙为某光敏电阻的控制电路,电源电压U0恒定,RG为光敏电阻,其阻值随空气透光程度的变化而变化,R0为定值电阻.当光敏电阻分别为6Ω和18Ω时,电压表的示数分别为6V和3V,则R0= Ω;为监测空气的透光程度,现将电压表表盘的相关刻度值转化为对应的总阻值(R0+RG),则转化后表盘上从左到右相邻两刻度线对应阻值的减小量将 (选填“增大”、“不变”或“减小”)

试题篮