试题
试题
试卷
登录
注册
当前位置:
首页
题型:单选题
题类:常考题
难易度:困难
浙江省教育绿色评价联盟2019年10月通用技术选考适应性试卷
随着现代农业技术的发展,农机自动驾驶导航系统代替人工转向操作已经成为现代农业的一个重要组成部分,由无线信号系统、导航控制器系统、转角控制系统、终端显示系统组成。农机自动驾驶导航的基本工作原理是:通过导航显示终端设定导航线,无线信号系统内的转角传感器、GNSS接收机获取拖拉机的实时位置和姿态,计算拖拉机与预设导航线的偏离距离和航向,导航控制器,驱动步进电动机转向结构,即时修正拖拉机方向轮的行驶方向。请完成问题:
(1)、
从系统角度分析,下列关于农机自动驾驶导航系统的说法正确的是( )
A、
农机自动驾驶导航系统由多个子系统构成,体现了系统的综合性
B、
雷雨天气导致信号接收出现异常,体现了系统的环境适应性
C、
无线信号系统实时监测与接受位置信号,体现了系统的动态性
D、
根据拖拉机的实时位置计算并修正偏离距离和航向,体现了系统分析的科学性原则
(2)、
为了使拖拉机位置自动准确的控制在预设路线上,以下控制方案更合理的是( )
A、
将控制手段改为人工控制
B、
将控制方式改为开环控制
C、
增加传感器检测行驶速度,实现自动驾驶
D、
GNSS天线同时接收北斗双频或三频及GPS双频信号
(3)、
从控制角度分析,下列说法正确的是( )
A、
控制量是电机的转速
B、
控制器是GNSS接收机
C、
被控对象是步进电机
D、
该控制系统属于开环控制
举一反三
如图所示的水位控制系统,当水位上升到设定值时,感压包压力增大,使传动膜片向外胀,推动连接杆带动电触点断开,电磁阀门关闭,停止进水;当水位低于设定值时,感压包压力减小,弹簧回拉连接杆,使电触点闭合,电磁阀导通,开始进水,如此反复。
请根据描述及示意图,完成以下各题:
下图为小陈设计的一款分拣器的原理图。当按下设备电源按健后,电机运转,带动传送带传送物料。当传感器检测到的物料材质为对应材质时,由PLC控制柜控制相应的气缸推出,使物料离开传送带,进入相应滑槽,实现不同物料分类的功能,根据材料完成问题。
如图所示是某品牌中央空调内部简易结构示意图,内置温度控制子系统和空气质量调节子系统。工作原理为:当温度传感器检测到室温与设定值不一致时,温度控制器控制电动调节阀,将热风或冷风通过风机,由风门送入房间,实现温度调节。回答问题。
如图所示是四冲程内燃机的结构示意图。活塞式内燃机将燃料和空气混合,在其汽缸内燃烧,释放出的热能使汽缸内产生高温高压的燃气,燃气膨胀推动活塞作功,再通过曲柄连杆机构将机械功输出,驱动从动机械工作。系统分析时,可以把内燃机看作成一个系统,下列关于该系统的说法不正确的是( )
鼓式刹车系统由制动鼓、制动轮缸、制动蹄等部件组成。它是利用液压将刹车片往外推,使刹车片与随着车轮转动的刹车鼓内面发生摩擦,从而产生刹车的效果。以下关于鼓式刹车系统的说法中,正确的是( )
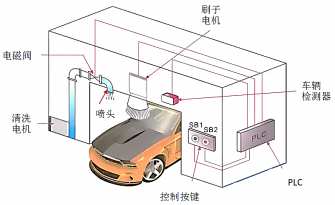
如图所示是某汽车自动清洗控制系统,其控制部分可分为喷水控制子系统和洗刷控制子系统。喷水控制子系统工作过程:PLC根据车辆检测器检测到汽车到位信号,控制清洗电机接通电磁阀产生高压水,通过喷头清洗车辆。洗刷控制子系统中,PLC控制刷子电机洗刷车辆。请根据题图及其描述完成小题。
返回首页
相关试卷
2025年1月浙江通用技术高考选考真题
浙江省余姚名校2023-2024学年高二下学期通用技术3月质量检测(选考)试卷
浙江省强基联盟2024年3月高三通用技术普通高校招生选考科目考试
浙江省宁波余姚市重点中学2023-2024学年高二下学期通用技术3月质量检测(学考)试卷
浙江省宁波余姚市重点中学2023-2024学年高一下学期通用技术3月质量检测试卷
试题篮
编辑
生成试卷
取消
登录
x
请输入网站账号/手机号码/邮箱
请输入密码
自动登录
忘记密码
登录
其它登录方式:
免费注册