试题
试题
试卷
登录
注册
当前位置:
首页
题型:综合题
题类:模拟题
难易度:普通
浙江省名校通用技术仿真训练卷(一)
如图所示是一种果实采摘机器人的结构示意图,它具有行走和采摘功能,行走和采摘都可用无线遥控控制。当机器人行走到采摘目标附近,先通过人工判断果实是否成熟,若果实成熟,则使用无线遥控装置操纵机器人动作,让机器人的夹持器摘取果实。夹持器开合夹取的控制原理是:主控制器接收到无线遥控发出的指令,驱动机械臂上伺服电机1控制夹持器的张开和合并,使得夹持器能够完成采摘任务。请回答以下问题:
(1)、
根据示意图及描述,分析夹持器开合夹取的控制过程,如果把夹持器作为被控对象,则控制器是
,执行器是
;(在“①伺服电机1;②电源;③主控制器;④伺服电机2”中选择合适的选项,将序号填写在横线处)
(2)、
把机器人看作一个系统,它又可分为夹持和行走子系统。以下属于行走子系统的是
、
;(在“①履带;②主臂;③履带马达;④连杆”中选择两项,将序号填写在横线处)
(3)、
机器人采用了履带,可以适应不同的地形,如山路、泥地等。从系统的特性分析,说明该系统具有良好的
(在“①整体性;②环境适应性;③动态性;④相关性”中选择一项,将序号填写在横线处)。
举一反三
从2012年6月开始,高考考场统一启用考场监控系统,使高考更加公平公正。从系统的角度分析,下列说法中不正确的是( )
机场安检机的原理是:当电源接通后,由发射板向门两边发射一个频率为 7.8KHZ 的信号, 当被检查人员从安检门通过时,没有金属通过,接受线圈接收到的信号为零;当有金属通过 或人身体上所携带的金属超过根据重量、数量或形状预先设定好的参数值时,金属切割磁场 磁通量发生变化,接收线圈收到很微弱的电信号,传送到信号采集板进行放大、整行后送到 CPU 进行一系列的处理,最后输出音频信号驱动蜂鸣器产生报警,并进行相应的区位显示
可让安检人员及时发现该人所带的违禁金属物品。请回答以下问题:
如图所示为谷歌自动驾驶原型车,它依靠人工智能、视觉计算、雷达、监控装置和全球定位系统协同合作,让电脑可以在没有任何人主动的操作下,自动安全地操作机动车辆行驶,关于该系统的说法中错误的是( )
如图所示是电子围栏系统示意图。它由控制主机、围栏和报警装置等组成。当围栏遭到入侵者触碰或破坏时,能发出电脉冲将入侵者击退,并向安全监控设备发送信号,报警装置发出报警信号。请根据示意图和上述说明,完成(1)~(2)题。
如图所示为某海水淡化系统工作示意图,请完成问题。
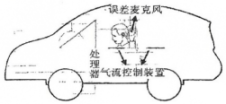
某公司设计了一种汽车开窗噪声控制系统,工作原理如下:误差麦克风采集车辆内的噪音信导,并将其发送至处理器,处理器接受噪声信号,并计算与其匹配的气流控制信号;将气流控制信号发送至气流控制装置从而控制气流流动,以减小车辆内噪声的声能量,降低汽车内开启车窗后的噪声。从系统的角度分析,下列说法中不恰当的是( )
返回首页
相关试卷
2025年1月浙江通用技术高考选考真题
浙江省余姚名校2023-2024学年高二下学期通用技术3月质量检测(选考)试卷
浙江省强基联盟2024年3月高三通用技术普通高校招生选考科目考试
浙江省宁波余姚市重点中学2023-2024学年高二下学期通用技术3月质量检测(学考)试卷
浙江省宁波余姚市重点中学2023-2024学年高一下学期通用技术3月质量检测试卷
试题篮
编辑
生成试卷
取消
登录
x
请输入网站账号/手机号码/邮箱
请输入密码
自动登录
忘记密码
登录
其它登录方式:
免费注册